Research Experience
My research work is in developing algorithms for mobile manipulator robots that can help older people and disabled people to do their essential daily tasks. Interested in transforming robots into cobots to collaborate with us on everyday activities.
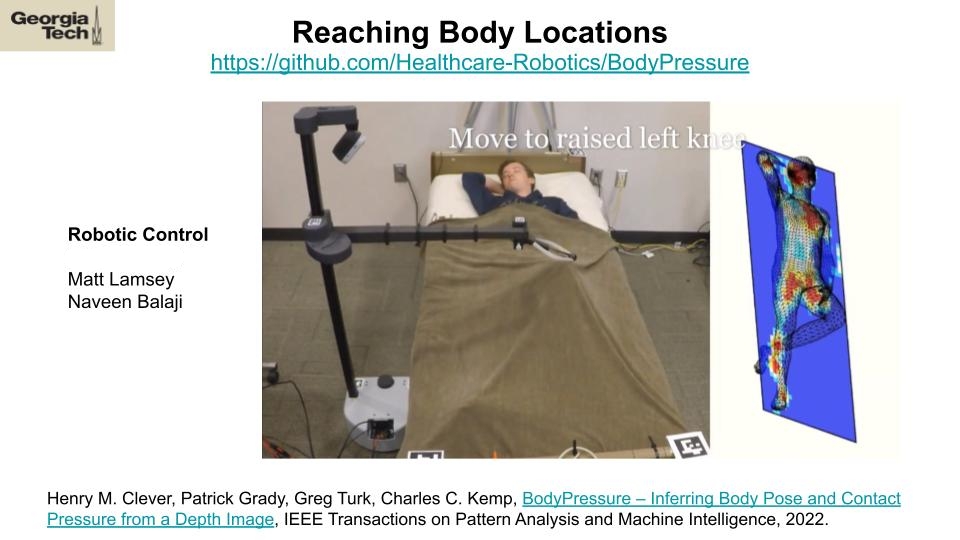
Robot reaches human body parts and perform itchscrating task
Incorporated collaborative reinforcement learning algorithms into assistive tasks to improve human-robot interaction.
Both the Human and Robot are active agents, learn to cooperate and complete the task
Real-world Implementation
Implemented the algorithm on a real robot and tested it on a human subject.
Implemented human pose detection in the occluded region using trained deep-learning models.
Object Handover to active human (sim2real)
The robot learns the handover policies on pybullet simulation environment
Real world transfer of robot policies

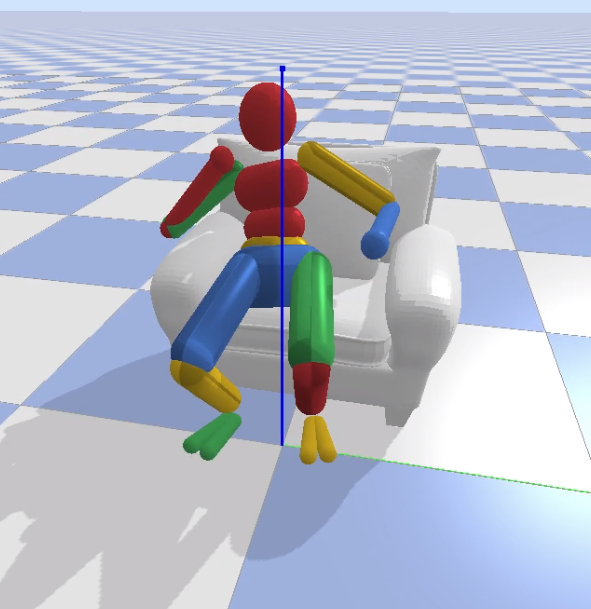
Human behaviour generation using physics model
Human on bed using public slp dataset
Human on chair sitting in quasi-static pose
Robotic Caregivers course project
Developed a robot that can perform a variety of tasks such as reaching, grasping, and placing objects in a cluttered environment.
Implemented a aruco based planning algorithm on the real robot to do the tasks.
The real time autonomous robot demo was performed on the class
[Paper][Code]
Robotic Intelligent Planning course project
Human-robot interaction is a key part of humanity’s transition to an automated society
Developed a realistic human-robot simula- tion environment to analyze dynamic human behavior in the control loop.
mplemented and evaluated various super- vised and unsupervised learning algorithms to complete the given task successfully (PPO, SAC, A2C, behavior cloning, MARWIL).
[Paper][Code]